近日,由我室吴启晖教授、博士生李嘉豪、周福辉教授(通讯作者)、博士后季家欢、博士生王浩洋、博士生梁宏韬、马凯光教授共同提出的认知具身智能新范式以“Cognitive Embodied Learning for Anomaly Active Target Tracking”(认知具身学习及其在异常主动目标跟踪中的应用)为题发表于Nature子刊《Communications Engineering》,南京航空航天大学为唯一通讯单位。文章链接:https://www.researchsquare.com/article/rs-5789601/v1
面向低空经济发展与落实国家频谱战略需求,推动空域资源与频谱资源高效利用具有重要意义。无人机、eVTOL等低空智能飞行器在城市交通、物流配送、应急救援等领域的应用日益广阔。然而,这些应用场景也面临诸多严峻挑战:低空空域环境复杂,高楼林立易造成物理遮挡;同时,密集的通信、导航与感知信号使得电磁频谱环境复杂,信号干扰、GPS欺骗等严重异常情况频发。这些突发的物理与电磁异常,已成为制约低空智能体自主、安全运行的核心瓶颈。
为应对这一挑战,以具身智能(Embodied Intelligence)为代表的新一代人工智能技术,强调智能体通过与环境的物理交互进行学习,展现出巨大潜力。然而,现有具身智能学习范式在处理突发、严重的异常时性能受限,容易导致决策失误甚至任务失败,尤其是在需要高可靠性的主动目标跟踪(Active Object Tracking, AOT)等关键任务中,这一短板尤为致命。因此,如何让智能体在复杂动态、充满未知异常的真实世界中做出鲁棒、高效的决策,是亟待解决关键技术难题。
本研究受诺贝尔经济学奖得主丹尼尔·卡尼曼提出的“人脑双决策系统”理论启发,创新性地提出了一种认知具身学习(Cognitive Embodied Learning, CEL)-具身智能新范式。该范式模拟人脑在常规与紧急状态下切换不同决策模式的能力,使智能体能够鲁棒、高效地应对复杂环境中的突发严重异常挑战,丰富了我室提出的认知决策环理论。
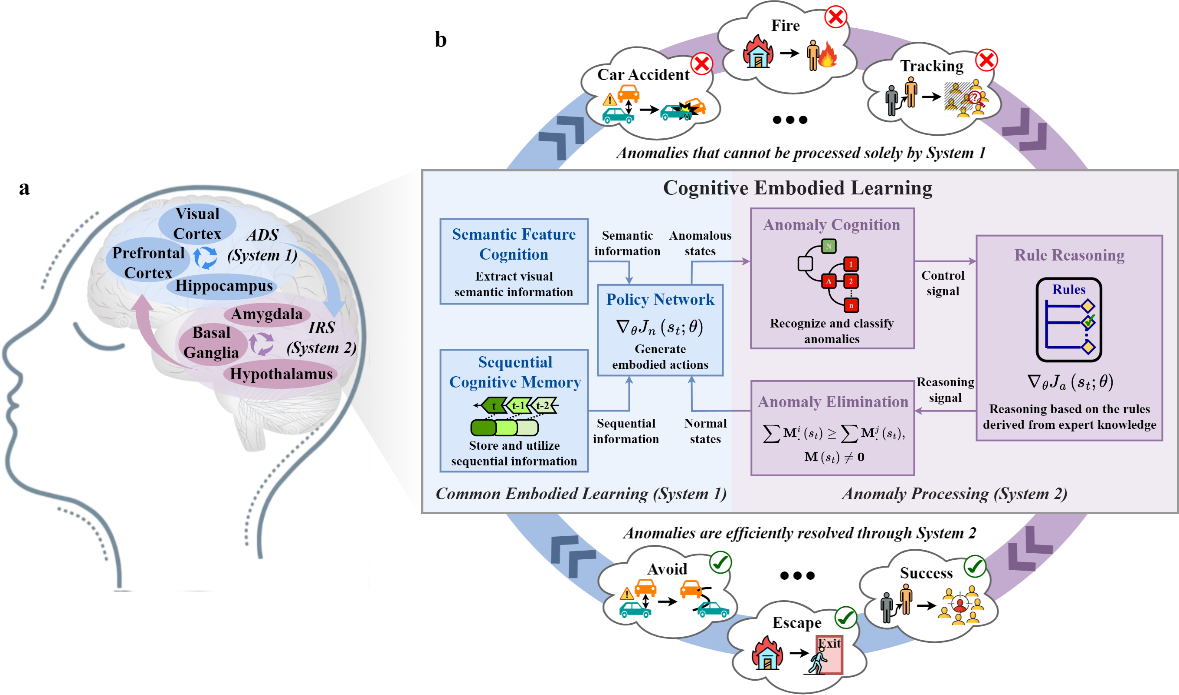
图1:人脑双决策系统机制及对CEL框架的启发
该研究的核心机理在于模仿人脑的两种决策系统:系统1(直觉、快速)和系统2(分析、缓慢)。这一思想与我室长期研究的“感知-认知-决策-控制”(OODA)认知决策环理论不谋而合,并构成了对其核心环节的重大革新。传统的OODA环描述了智能体决策的通用流程,而CEL框架则为其赋予了“快思”与“慢想”两种截然不同的认知模式。这使得智能体在执行OODA环时,不仅能像“系统1”一样依靠直觉快速反应,更能在认知环节识别出严重异常后,切换到“系统2”进行审慎的逻辑推理与规划,从而实现了决策的鲁棒性与高效性的统一。
CEL框架(图1b)包含两种工作模式:常规的具身学习模式和异常处理模式。在正常情况下,智能体通过策略网络进行决策;一旦异常认知模块(Anomaly Cognition Module, ACM)检测到严重异常,系统将动态切换至异常处理模式。该模式由ACM、规则推理模块(Rule Reasoning Module, RRM)和异常消除模块(Anomaly Elimination Module, AEM)协同工作,利用预定义的专家规则快速执行恢复策略,待异常消除后再切换回常规模式。
该成果标志着我室在具身智能与无人系统控制领域取得了重要进展。未来,我室将继续围绕国家对低空经济发展、电磁空间治理、电磁频谱管控、空天智能基建等重大战略需求,锚定该领域科技前沿和关键技术难题,进一步深化认知科学与人工智能的交叉研究,提出真问题,研究真理论,做出真贡献,探索和丰富认知决策环理论及其在低空、频谱等领域的应用。