日前,《Nature》杂志子刊《Nature Reviews Electrical Engineering》将我室发表在《IEEE Journal on Selected Areas in Communications》的工作“A Vehicle-Mounted Radar-Vision System for Precisely Positioning Clustering UAVs”遴选为Research Highlights(研究亮点),以“Vehicle-based vision–radar fusion for real-time and accurate positioning of clustered UAVs”为题进行了报道,充分肯定了本工作在集群无人机精确定位方面的价值与意义。评论认为集群无人机定位技术是实现多类实际应用的有效保障,本工作提出方法能够有效解决集群无人机定位面临的高动态、多目标下高精度定位挑战。

作为低空经济的重要组成部分,集群无人机在无人机快递、表演、通信中继、救援等方面具正在被广泛应用。然而,由于集群无人机的集群特性以及无人机载荷、工作范围灵活的特性,“黑飞”与失控集群无人机会对物理世界与信息世界造成严重干扰,例如基础设施破坏、隐私泄露、通信干扰和网络攻击等。因此,实现高效集群无人机监管以避免潜在威胁,对于低空经济发展和低空空域安全具有重要现实意义,其基本前提是对集群中每架无人机进行精确实时的感知和定位。


集群无人机危害
集群无人机定位面临三个方面的独特挑战。1. 低显著性无人机特征:由于用于集群无人机的无人机通常体积较小且在广阔的三维空间中飞行,感知到的无人机特征较弱,这使得实现精确的无人机感知和定位具有挑战性。2. 高隐蔽性集群目标: 由于集群无人机的高协同能力,无人机之间可以实现相互遮挡或利用空间物体作为掩体以规避监测,这使得精确的无人机定位变得困难。3. 高实时定位需求:无人机的快速飞行能力要求采用实时定位方法以适应其快速运动。
许多现有系统侧重于增强单一模态传感器(例如视觉和雷达)的感知能力,受限于单感知模态的模态局限性(例如近距离或粗粒度)。跨模态无人机定位系统有望实现高精度定位,但在模态选择和跨模态信息融合方面面临着重大挑战。同时,许多系统是基于固定定位终端的因而具有单一感知视角,导致难以定位被遮挡的无人机。因此,克服上述限制是实现集群无人机的精确实时定位的重点和目标。
为了应对这些挑战,本工作首先为精确的集群无人机定位开发了一种新颖的面向动态感知特性的车载雷达-视觉集群无人机定位系统。系统利用雷达-视觉传感器进行无人机感知,利用车载边缘终端进行快速响应的感知融合与定位,并利用移动巡逻车提供宽范围的动态感知视角。

面向动态感知特性的车载雷达-视觉集群无人机定位系统
进一步地,为了解决跨模态和跨动态视角感知信息融合的挑战,本工作提出了一个基于匹配的时空融合框架。框架将融合问题新颖地视为一种自适应匹配问题,减少了传统校准挑战和复杂性。同时,本工作将跨模态关联经验知识(跨模态感知空间域关联)、空间域无人机飞行科学知识(无人机飞行特性)与时域定位语义知识(上一视角定位结果)融入定位框架。基于上述知识,框架实现了自适应地匹配跨模态特征和顺序动态视角特征,增强了无人机感知区域,并解决了遮挡情况下的定位难题。同时,设计了基于注意力的时空融合网络(attention-based spatiotemporal network,ASTNet)算法,提出一种投影注意力有效地实现了提出的基于匹配的时空融合框架。
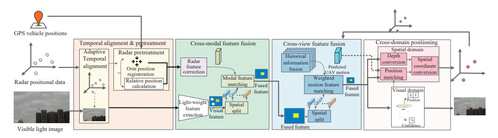
基于匹配的时空融合框架
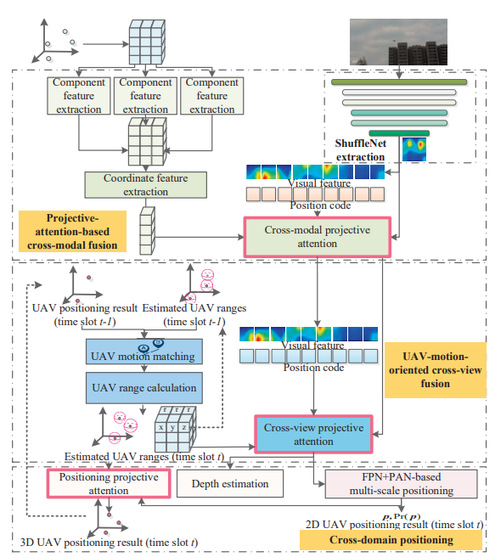
ASTNet算法
本工作搭建了雷达-视觉集群无人机定位巡逻车系统,并建立了包括两个集群无人机、包括五类无人机的无人机测试平台进行了实际集群无人机定位实验。与基线方法相比,本系统在适应各种挑战的前提下最多提高了18.2%的定位精度,定位速度超过20FPS。
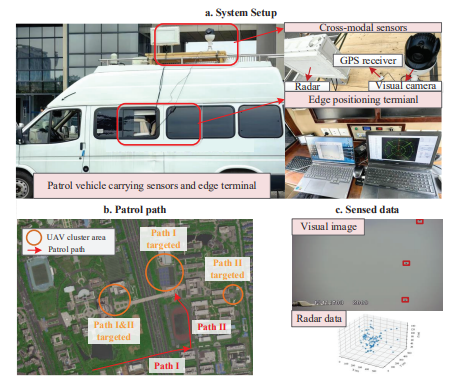
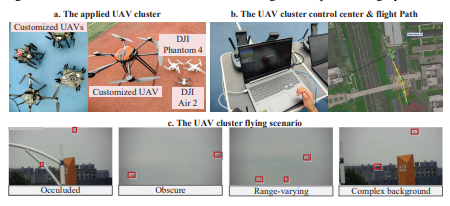
雷达-视觉集群无人机定位巡逻车系统与集群无人机测试平台

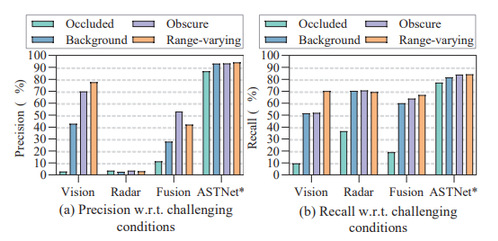
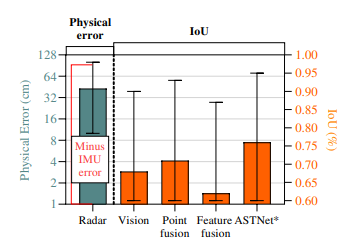
挑战性场景下定位效果
吴光宇,2021届南京航空航天大学本科毕业生。从事多模态认知计算相关研究,共发表论文13篇,以第一作者或通讯作者发表CCF-A类论文4篇,授权发明专利6项,第一发明人授权专利两项。
周福辉,国家优青,南京航空航天大学电子信息工程学院教授、博导,“面向航空航天的协同智能信息处理学科”111国家创新引智基地副主任,IEEE Senior Member。一直从事电磁空间多域资源认知决策理论与方法的研究,至今已在国际通信权威期刊或会议发表论文200余篇,其中ESI热点和高被引论文14篇,获得IEEE Globecom、IEEE ICC等国际会议最佳论文4篇,撰写专著4部,申请发明专利50余项,已授权30余项;参与国际标准和白皮书5项;作为主持人或课题负责人至今承担了包括国家重点研发、国家重点研发项目课题、国家自然科学基金优青等20余个国家级或省部级项目,科研经费累计超2000万元。入选斯坦福全球顶尖科学家榜单、爱思唯尔高被引学者、IEEE通信学会亚太地区杰出青年学者奖、国际无线电联盟青年科学家奖、中国科协“青年人才托举工程”、“江苏省333人才培养工程”、“江西省杰出青年基金”等人才计划,荣获江西省自然科学奖一等奖、E&T全球创新奖、日内瓦国际发明展金奖、中国发明协会发明创业奖创新奖一等奖等省部级和国际奖励。
Kai-Kit Wong(黄继杰),伦敦大学学院电子与电气工程系教授,IEEE Fellow,IET Fellow。从事5G、6G、流体天线系统和多址、超表面信号处理和表面波通信等方向研究,至今已在国际通信权威期刊或会议发表论文600余篇。自2020年起担任IEEE Wireless Communications Letters 的主编,并自 2020年6月起担任 IET Electronics Letters的无线通信主题主编。2020年,被斯坦福大学评为世界前2%的科学家(在所有领域中排名前0.89%)。
李向阳,国家杰青,中国科学技术大学计算机科学与技术学院教授、博士生导师。现任中国科大信息与智能学部执行部长,计算机科学与技术学院执行院长,中国科学院无线光电通信重点实验室主任。一直从事智能物联网,边缘计算,数据共享计算,物联网安全和数据安全隐私等方面的研究。自2000年以来已在高水平国际期刊及会议累计发表近500篇学术论文,其中CCF A类论文170余篇,获得近10次国际会议最佳论文奖。获批国内外专利50余项。撰写了无线网络领域专著《Wireless Ad Hoc and Sensor Networks: Theory and Applications》。是美国国家自然科学基金(NSF)、中国国家自然科学基金(NSFC)、香港自然科学基金(RGC HongKong)科技部重点研发计划等重大项目的评委。作为首席科学家承担了国家重点研发计划、杰出青年基金、海外杰出青年基金、国家自然科学基金重点项目、和美国基金委重点项目等20余项。
论文链接:https://ieeexplore.ieee.org/document/10559953
Nature Highlights链接:https://www.nature.com/articles/s44287-024-00087-w